Danh mục sản phẩm
Th04 26, 2021 / Theo Bientapbien 01 / in
1.Các loại chuyển động của RBCN
• Chuyển động điểm tới điểm PTP (tiếng Anh: point to point): Robot dẫn điểm hoạt động của dụng cụ dọc theo quỹ đạo nhanh nhất để đến điểm cuối. Những trục robot chuyển động quay. Diễn tiến chính xác của chuyển động thì không thể thấy trước được. PTP được chọn ở một dòng trong chương trình (Hình 2).

Dòng này có nghĩa là từ một điểm bình thường (thí dụ gọi là điểm HOME), điểm P1 được chạy với vận tốc Vel (tiếng Anh velocity) = 100% (trong phương pháp thủ công là 250mm/s) theo chuyển động PTP.
• Chuyển động LIN (tiếng Anh là linear = đường thẳng): Robot dẫn TCP (điểm hoạt động) với vận tốc đã được quy định, thí dụ 2m/s dọc theo đường thẳng đến điểm cuối P1
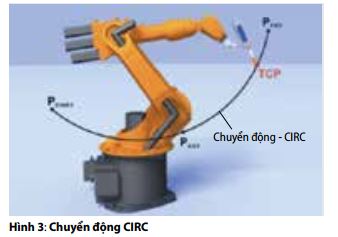
Chuyển động CIRC (tiếng Anh là circular = vòng tròn): Robot dẫn TCP (điểm hoạt động) với vận tốc đã được quy định, thí dụ 2m/s, dọc theo quỹ đạo tròn đến điểm cuối. Quỹ đạo tròn được xác định bởi điểm đầu, điểm phụ và điểm cuối.
Điểm P1 trong dòng này ở chương trình là điểm P AUX, một điểm phụ, để từ điểm xuất phát PSTART đến điểm cuối P2 (P End) (Hình 3).
Ở chuyển động thẳng LIN và vòng tròn CIRC thì vận tốc được cho trực tiếp bằng số, thí dụ vel = 2m/s chứ không cho bằng%. Ở tất cả 3 thí dụ lệnh “CONT” 1) được áp dụng. Nó được gọi là đi vòng qua (đi bỏ bước). Đi vòng qua (đi bỏ bước) có nghĩa là: TCP (điểm hoạt động) rời khỏi quỹ đạo, mà trên đó TCP sẽ đi chính xác đến điểm đích, và đi trên quỹ đạo nhanh hơn. Hình 4 diễn tả trường hợp đi vòng qua bởi một chuyển động PTP. Không đi qua điểm đã lập trình P2.

Trong chuyển động LIN thì khoảng cách do đi vòng qua từ P2 phải được cho biết, khoảng cách này được phép sai lệch từ chuyển động thẳng (Hình 5).

Trong trường hợp này không hình thành một quỹ đạo tròn. Trong chuyển động CIRC thì điểm Paux luôn được tiếp cận chính xác. Quỹ đạo chuyển tiếp từ chuyển động vòng đến chuyển động thẳng cũng không tương ứng với bán kính.
2.Giao tiếp của RBCN (Robot công nghiệp) và thiết bị ngoại vi
Lệnh cho phép giao tiếp với những thành phần ngoại vi cũng thuộc về lập trình điều khiển robot. Ở đó liên quan đến việc tiếp nhận và xử lý các tín hiệu đầu vào từ tế bào robot. Những tín hiệu đầu ra cũng được gửi vào tế bào từ robot (Hình 1).

Tín hiệu số (digital) được sử dụng nhiều cho tín hiệu đầu vào và đầu ra. Số lượng tín hiệu liên tục (analog) cho đầu vào và đầu ra được sử dụng ít hơn nhiều. Đại lượng vật lý của những tín hiệu này, thí dụ như áp suất, nhiệt được đổi thành đại lượng điện, thí dụ điện thế, rồi sau đó được số hóa.
• Lập trình của lệnh I/O (Vào/Ra) với câu lệnh logic.
Với lệnh “OUT”, cổng ra của rôbot được điều khiển với số 1. Nó được đặt ở tình trạng “TRUE” (đúng) và nhận được giá trị logic “1”.
Lệnh “WAIT FOR” đặt ra thời gian chờ tùy thuộc vào tín hiệu. Tín hiệu “TRUE” (đúng) được chờ nơi đầu vào IN1 của rôbot. Trong hình 2 chỉ ra rằng lệnh đầu vào IN1 có thể đứng ở điểm nào đó của quy trình chuyển động. Câu lệnh “WAIT FOR” cũng cho phép kết hợp với những kết nối logic đơn giản AND (và), OR (hoặc) hay NOT (không):
WAIT FOR (IN1) AND (IN2) hoặc WAIT FOR NOT (IN1 AND IN2)

• Lập trình cho tay cầm (cơ cấu ngón kẹp, dụng cụ kẹp chặt)
Tay cầm là bộ phận thành phần của hệ thống robot, với những bộ phận đó người ta thực hiện những nhiệm vụ xử lý. Nó được gọi là cơ cấu tác động cuối. Tay cầm hoạt động vơi lực giữ bằng cơ, điện từ hoặc khí nén (thí dụ chân không) (Hình 3).

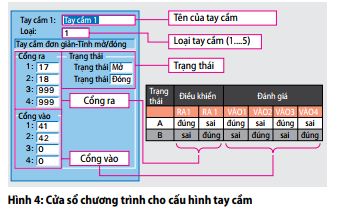
Cơ cấu tác động cuối cũng có thể là kềm hàn điểm trong kỹ thuật ghép nối hoặc dụng cụ phun cho sơn phủ màu. Tay cầm được kết nối trong phần mềm qua cửa sổ chương trình đặc biệt. Trong chương trình tay cầm được ký hiệu thí dụ với GRP1. Mỗi loại tay cầm được sắp xếp theo trạng thái của nó (mở/đóng); ngoài ra có thể sắp xếp cổng vào và cổng ra của hệ điều khiển robot vào lĩnh vực xử lý công việc của tay cầm (Hình 4).
Dụng cụ được gọi ra từ chương trình, thí dụ GRP 1 (gripper 1 = tay cầm 1), và được phân bố một trạng thái (STATE) (Hình 5).
Địa chỉ email của bạn sẽ không được công khai. Các trường bắt buộc được đánh dấu *