Danh mục sản phẩm
Th02 20, 2021 / Theo CỬA HÀNG VẬT TƯ / in Điện công nghiệp
Mục lục [Hiển thị]
Trong bài viết dưới đây, chúng ta sẽ thảo luận về điều khiển chuyển động tuyến tính và một số ứng dụng thực tế sử dụng chuyển động tịnh tiến, hệ thống điều khiển vị trí hay cơ cấu chấp hành dùng động cơ bước và động cơ servo. Loại điều khiển chuyển động tịnh tiến phù thuộc chủ yếu vào cơ cấu chấp hành, và các cơ cấu này có rất nhiều loại sản phẩm trên thị trường.
Một cơ cấu tịnh tiến là một thiết bị cơ khí chuyển đổi từ các nguồn năng lượng như không khí, điện năng hay chất lỏng để tạo chuyển động theo một đường thẳng và có thể tác dụng lực. Ở đây, chúng ta sẽ tập trung vào loại chuyển động chuyển năng lượng điện sang cơ học sử dụng động cơ bước hoặc động cơ servo.
Chuyển động tuyến tính là một lĩnh vực điều khiển chuyển động bao gồm một số công nghệ như động cơ tuyến tính, bộ truyền động tuyến tính, ray dẫn hướng tuyến tính và vòng bi lăn tuyến tính.

Các hệ điều khiển tuyến tính và cơ cấu chấp hành được ứng dụng trong tự động hóa công nghiệp và máy móc, máy công cụ, thiết bị ngoại vi máy tính như ổ đĩa và máy in, tự động hóa trong gia đình, đóng gói, lắp ráp, chẩn đoán hình ảnh và chẩn đoán y tế, sản xuất điện tử, kiểm tra công nghiệp và các ứng dụng robot
Hệ truyền động sẽ di chuyển các thành phần đến vị trí mong muốn. Các công nghệ điều khiển phổ biến nhất là truyền động trục vít bi, vít me bi hay dùng đai.

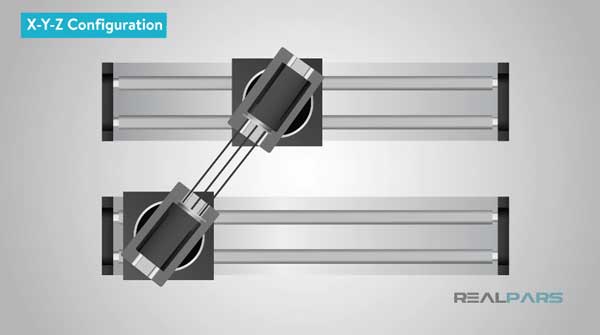
Trong các yếu tố xét đến hệ điều khiển tuyến tính tính số lượng trục điều khiển là yếu tố hàng đầu mà các kỹ sư quan tâm đến. Loại phổ biến nhất là loại 2 trục X và Y, sau đó là loại 1 trục và 3 trục. Có rất nhiều nhân tố cần để ý khi lựa chọn hệ điều khiển tuyến tính phù hợp.

Định hướng hệ thống và các cách gá đặt là những nhân tố chính. Trong hệ thống tuyến tính một trục, có thể coi là chuyện đơn giản, nhưng trong hệ thống nhiều trục, sẽ có rất nhiều vấn đề kèm theo.
Các yếu tố cần xem xét ở đây bao gồm hướng di chuyển của từng trục. Tải cần phải được di chuyển đồng thời theo nhiều trục hay mỗi trục di chuyển riêng lẻ? Hệ thống yêu cầu vận chuyển hoặc đường ray di chuyển? Trục di chuyển là dọc, ngang hay nghiêng? Và cuối cùng là vị trí lắp của mỗi bộ truyền động ở 0, 90 hay 180 độ theo chiều ngang?
Thông số kỹ thuật bổ sung khi xét đến thiết kế điều khiển chuyển động tuyến tính bao gồm: lực, tốc độ, khoảng cách di chuyển, độ chính xác và độ lặp lại và yêu cầu tuổi thọ làm việc hoặc chu kỳ nhiệm vụ của máy.
Để xác định cần bao nhiêu lực để nâng một vật thể hay lượng ma sát tối thiểu để di chuyển vật thể. Biết được trọng lượng của vật thể, trọng tâm của nó cũng như điểm tọa độ trên mỗi trục đều được tính toán để kiểm soát được lực yêu cầu. Kiểu tính toán này cần sự cẩn thận bởi các tải trọng mô-men hay hiệu ứng quay của một lực tại nhiều vị trí trên hệ thống có thể xuất hiện và làm sai lệch kết quả mong muốn.

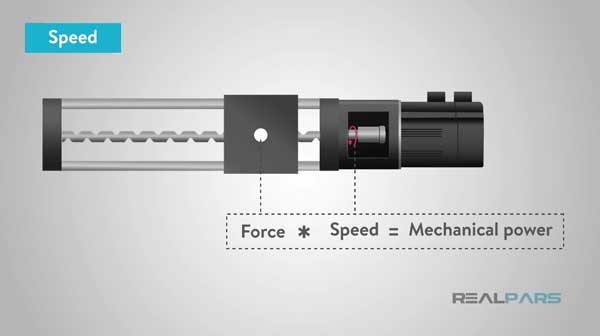
Sau đó, bạn sẽ cần xác định tốc độ di chuyển theo đơn vị milimet trên giây hay inch trên giây. Xác định được tốc độ và lực sẽ giúp bạn tính được công suất cơ học tối thiểu và công suất của động cơ là bao nhiêu.
Tốc độ di chuyển ngang và thời gian di chuyển có phần hạn chế với các ổ vít bi. Các bộ truyền động vít bi thường có tốc độ tối đa 3 m/s, đối với các bộ truyền động truyền động đai, tốc độ tối đa là khoảng 8 – 9 m/s

Gia tốc lớn nhất của bất kỳ bộ truyền động điều khiển chuyển động tuyến tính nào là khoảng 40 m/s2, tuy nhiên, gia tốc thực tế thường nhỏ hơn nhiều so với giá trị này, thường là giữa 0,5 m/s2 và 5 m/s2. Giảm tốc cũng rất quan trọng, đặc biệt trong trường hợp cần dừng khẩn cấp.

Bạn cũng sẽ cần xác định quãng đường di chuyển của tải, được gọi là hành trình di chuyển. Rất nhiều cơ cấu truyền động được sản xuất theo nhiều kích thước tiêu chuẩn, tốt nhất bạn nên chọn loại cơ cấu có kích thước gần với yêu cầu của mình, so với việc tự làm một cơ cấu sẽ tiết kiệm hơn nhiều.

Xác định được tổng hành trình của mỗi trục là tối quan trọng để xây dựng nên yêu cầu của hệ thống cũng như giúp chọn lựa loại truyền động phù hợp nhất.
Ví dụ: Với bộ truyền động tuyến tính trục vít, chiều dài hành trình được giới hạn trong chiều dài của chính trục vít. Do đó, chiều dài hành trình tối đa thường là dưới 3 mét. Nhưng với các hệ thống điều khiển bằng dây đai, không có hạn chế nào như vậy và vì vậy độ dài hành trình có thể cao hơn mức này, lên tới 20 mét nếu được yêu cầu. Nếu sử dụng động cơ tuyến tính, hành trình thường khoảng 10 mét.

Ngoài ra, bạn sẽ cần xác định các yêu cầu về tuổi thọ làm việc hoặc chu kỳ nhiệm vụ. Chu kỳ nhiệm vụ được xác định trong tần suất bộ truyền động hoạt động và thời gian trôi qua giữa các lần di chuyển
Chu kỳ nhiệm vụ tính dựa trên số lần lặp lại dự kiến trên một đơn vị thời gian tính bằng giờ mỗi ngày, phút mỗi giờ hoặc số hành trình mỗi phút. Thời gian chu kỳ xác định tuổi thọ của hệ thống điều khiển chuyển động tuyến tính.
Chuyển động lặp đi lặp lại của qua lại hoặc lên xuống tạo ra ma sát và ma sát này mài mòn các thành phần hệ thống.
Thời gian chu kỳ hoặc chu kỳ nhiệm vụ là một tiêu chí quan trọng trong việc xác định tuổi thọ hoạt động dựa trên thời gian mà bạn muốn hệ thốngcủa mình hoạt động trong bao lâu.

Độ chính xác và độ chính xác lặp lại là một trong những yếu tố cần xét đến nhất trong hệ thông, trong đó thể hiện chất lượng chuyển động hoặc độ chính xác mong muốn hay sản phẩm cuối được sản xuất.
Lấy ví dụ mới loại máy có nhiệm vụ nhặt lên và đặt vật xuống, độ chính xác lặp lại và sai số là điều quan trọng nhất. Thông thường, sai số của cơ cấu truyền động trục vít me bi la 0.16mm trên 1 mét với độ lặp lại là ±0.01mm.

Đối với cơ cấu dây đai, sai số này là khoảng 0.5mm trên 1 mét, với độ lặp lại là ±0.10 mm. Các vấn đề khác là có nên sử dụng các công tắc giới hạn hoặc thiết bị phản hồi như chiết áp và bộ mã hóa cho mục đích định vị hay không.
Có nhiều bộ truyền động tuyến tính để lựa chọn, ví dụ như bộ truyền động trục vít và bộ truyền động đai. Thiết bị truyền động trục vít bao gồm bộ truyền động trục vít me, bộ truyền động trục vít bi và bộ truyền động con lăn hành tinh. Thiết bị truyền động vít me có một con lăn có ren khớp với trục vít, di chuyển khi trục vít quay.

Các hệ thống định vị bằng trục vít được ứng dụng khi đòi hỏi độ sai số thấp và độ chính xác lặp lại chuẩn. Các cơ cấu định vị dưới đây sử dụng một acme hoặc vít bi làm cơ chế truyền động.

Các vòng bi được dùng để đỡ tải. Giải pháp dùng vít me có kiểu cấu trúc đơn giản và tiết kiệm nhất. Rất nhiều các thiết kế điện – cơ được tích hợp trục vít me và con trượt, trong khi một số khác sử dụng trục vít bi và con trượt bi.

Trong cả hai trường hợp, trục vít có thể được kết nối trực tiếp với động cơ hoặc thông qua một loạt các bánh răng. Bánh răng được sử dụng để khiến động cơ được giảm tốc độ và cung cấp mô-men xoắn cần thiết để xoay vít dưới tải nặng hơn, động cơ sẽ có khả năng điều khiển trực tiếp. Chuyển động quay của động cơ được chuyển thành chuyển động tuyến tính của bộ truyền động.

Một trục vít me có một rãnh xoắn ốc liên tục được gia công trên chu vi của trục chạy dọc theo chiều dài, tương tự như ren trên bu lông.
Ren trên trục vít me là một dạng con trượt với các ren xoắn ốc khớp chính xác với trục. Con trượt thường được cố định và ngăn không cho quay cùng với trục vít.
Khi trục vít quay, con trượt được điều khiển chuyển động dọc theo trục. Hướng chuyển động của con trượt sẽ phụ thuộc vào hướng quay của vít dẫn. Kết nối tải với con trượt, chuyển động quay có thể được chuyển đổi thành chuyển động tuyến tính có thể sử dụng.

Thiết bị truyền động trục vít bi sử dụng vòng bi, đắt hơn nhưng tạo ra ít ma sát hơn so với thiết bị truyền động trục vít me.
Trong ổ trục vít bi, các dãy bi di chuyển dọc theo các rãnh trong một trục ren và lưu thông qua một đai ốc. Bởi vì các vòng bi đều chịu tải, ổ bi chuyển động tuyến tính trục vít có khả năng tạo ra lực đẩy tương đối cao.
Một ổ trục vít bi kết hợp với chuyển động lặp lại và một hệ thống cứng xử lý lực và moment cao. Các hệ thống như vậy hoạt động tốt trong các ứng dụng định vị chính xác với tải trọng cao và chu kỳ nhiệm vụ cao.

Bộ truyền động trục vít con lăn hành tinh sử dụng con lăn có ren bao quanh trục ren là giải pháp đắt nhất nhưng cũng bền nhất.
Các bộ điều khiển bằng dây đai dựa trên việc sử dụng các dây đai và trong các ứng dụng định vị hành trình dài hoặc tốc độ cao trong đó bộ truyền động trục vít không có tính thực tế, thông thường có hành trình trên 6 feet.
Cơ cấu truyền động dây đai và pully cung cấp định vị tốc độ cao có lặp lại ổn định. Điều khiển bằng đai thường khá yên tĩnh và phù hợp cho các ứng dụng lưu thông cao, độ chính xác thấp hơn. Trục vít bi thường đắt tiền hơn cung cấp sự hiệu quả truyền động, độ chính xác và độ cứng cao.

Các bộ điều khiển bằng dây đai, dẫn hướng bằng bi dành cho các ứng dụng tốc độ cao, tăng tốc cao với tải trọng lớn và tải trọng thời điểm cao.
Các hệ thống định vị điều khiển chuyển động tuyến tính tích hợp rất dễ sử dụng và có thể được mua trọn bộ một cách dễ dàng. Hầu hết các hệ thống định vị được cấu hình sẵn bao gồm chân đế, vít bi và động cơ servo / bước với bộ điều khiển tích hợp để vận hành máy nhanh chóng và dễ dàng.
Có nhiều công ty trên thị trường cung cấp cung cấp các giải pháp hoàn chỉnh cho nhiều ứng dụng điều khiển chuyển động tuyến tính. Các công ty này sẽ hỗ trợ kỹ thuật trong các loại kích thước của động cơ hay các cơ cấu tuyến tính.
Cũng có rất nhiều nhà cung cấp phần mềm giúp người dùng cuối hoặc OEM trong thiết kế hay lựa chọn loại động cơ, cơ cấu chấp hành.
Ví dụ: Các hình ảnh dưới đây thể hiện chương trình phần mềm, sau khi nhập các thông số, các dữ liệu về quỹ đạo chuyển động hay yêu cầu động cơ cho hệ thống được thể hiện.

Lấy ví dụ các ứng dụng của điều khiển truyền động tuyến tính trong máy móc công nghiệp, yêu cầu tải định vị, xếp hàng, đóng gói, nhặt và thả, vận hành kho tự động. Bạn cũng sẽ có thể tìm thấy chuyển động tuyến tính được sử dụng trong máy cắt và máy vẽ.
Chuyển động tuyến tính cho các ứng dụng y tế sử dụng như trên giường trong phòng mổ, máy X-quang, MRI và Máy quét CT cũng như ghế nha sĩ.
Chuyển động tuyến tính cho chẩn đoán y tế và điều trị được sử dụng trong các đầu quét và bàn bệnh nhân. Các lĩnh vực khác bao gồm Ung thư, Y học hạt nhân, CT / MRI / Hình ảnh, Mặt nạ di động và Robot phẫu thuật.

Chuyển động tuyến tính trong tự động hóa phòng thí nghiệm y tế được sử dụng để nhặt lên và đặt xuống, lấy mẫu DNA, nuôi cấy tế bào, thử nghiệm dịch chuyển không khí và phân phối thuốc.
Điểm quan trọng trong các ứng dụng này là phải có độ tin cậy tốt và giảm tối đa công sức bảo trì để giúp giảm thiểu thời gian chết và tối đa hóa hoạt động.
Hoạt động tự động hóa trong phòng thí nghiệm thành công có thể giảm chi phí cho người dùng cuối và tăng tốc độ phân phối các sản phẩm y tế.
Một hệ thống băng tải trên cao là một giải pháp thuận tiện khi một dây chuyền lắp ráp đòi hỏi một dòng vật liệu ổn định đến các khu vực lắp ráp chính dọc theo các dây chuyền. Hệ thống băng tải này cũng có thể được sử dụng để định vị các công cụ và thiết bị lắp ráp.
Những lợi ích của hệ thống tốc độ nhanh này thường thấy trên dây chuyền lắp ráp giúp người vận hành di chuyển thiết bị một cách chính xác và giảm nguy cơ bền mỏi và lỗi tổng thể.

Ngành công nghiệp thực phẩm đặt yêu cầu cao với các thiêt bị lưu chuyển các vật liệu. Các điều kiện làm việc khắc nghiệt được tìm thấy ở những nơi như nhà máy sữa, tiệm bánh và nhà máy bia cho thấy thiết bị phải tiếp xúc với nhiệt độ khắc nghiệt, nước bắn vào, bụi bẩn và chất tẩy rửa.
Thiết bị được yêu cầu phải nhanh và chính xác để theo kịp dây chuyền sản xuất tốc độ cao. Đây chỉ là một vài trong số rất nhiều ứng dụng được sử dụng trong nhiều ngành công nghiệp.
Địa chỉ email của bạn sẽ không được công khai. Các trường bắt buộc được đánh dấu *
Th11 22, 2021 by Nguyễn Hải
Th11 20, 2021 by Nguyễn Hải

