Danh mục sản phẩm
Th04 26, 2021 / Theo Bientapbien 01 / in
1.Lập trình của RBCN (Robot công nghiệp)
Lập trình được thực hiện hoặc là trực tuyến (online), nghĩa là trực tiếp tại bảng điều khiển rôbot ở nơi làm việc (tế bào gia công) hay ngoại tuyến (offline) tại nơi lập trình với máy tính cá nhân mà không trực tiếp thấy rôbot (Hình 3).

Trong lập trình bằng phương pháp dạy học (teach-in)2 thì những điểm trong không gian được điều khiển chạy đến bằng tay qua một bảng điều khiển tương ứng và tạo nên những chức năng của tay máy. Chương trình lập được qua đó có thể thử nghiệm và tối ưu hóa. Vận tốc di chuyển tay và vận tốc do chương trình có thể được chỉnh một cách liên tục.
Lập trình dưới dạng văn bản là quy trình của chương trình được thực hiện với những câu lệnh (lệnh) trong một ngôn ngữ lập trình của robot. Có những ngôn ngữ khác nhau để sử dụng cho những hệ thống robot riêng lẻ. Lập trình tương tác qua đồ họa truy cập trở lại vào dữ liệu CAD của tế bào robot (hệ thống ngoại vi) và dữ liệu của robot ở dạng mô hình dây, mô hình mặt phẳng và mô hình khối. Những chức năng xử lý có thể được lập trình ngoại tuyến (offline) và mô phỏng ảo trên một giao diện cho người sử dụng trước khi nó được kiểm tra và sử dụng trên thiết bị thật. Khác với việc lập trình như lập trình của máy CNC, những điểm trong không gian mà robot cần phải tiếp cận, được tìm thấy qua việc dạy (sự huấn luyện). Ở đây đơn vị thao tác chuyên dùng cho rôbot được đưa vào sử dụng (Hình 1).

Bàn điều khiển này có những bộ phận an toàn được tích hợp, thí dụ nút chấp nhận, không kích hoạt nó thì robot sẽ không hoạt động.
2.Hệ trục tọa độ
Để mô tả những điểm trong không gian trên các chuyển động của trục, người ta cần các hệ trục tọa độ khác nhau (viết tắt là KoSyst): WORLD: Hệ trục tọa độ WORLD là một hệ trục tọa độ vuông góc cố định được quy định. Nó là hệ trục toa độ gốc cho các hệ trục tọa độ ROBROOT và BASE. Trong việc chỉnh về gốc (chỉnh về vị trí cơ bản) thì hệ trục tọa độ-gốc nằm trong chân robot và trùng hợp với ROBROOT (Hình 2).
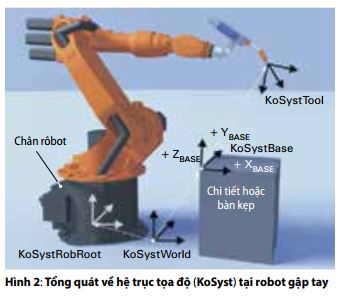
ROBROOT: với ROBROOT có thể định nghĩa được một dịch chuyển của robot đến hệ trục tọa độ gốc (WORLD). BASE: Hệ trục tọa độ BASE là hệ trục tọa độ vuông góc, mô tả vị trí của chi tiết. Nó dựa vào hệ trục tọa độ WORLD và được đo bởi người sử dụng. TOOL: Hệ trục tọa độ TOOL là hệ trục tọa độ vuông góc, nằm tại điểm hoạt động TCP (Tool Center Point) của dụng cụ. Nó dựa vào hệ trục tọa độ BASE. Trong việc thiết lập cơ bản thì gốc của hệ trục tọađộ TOOL nằm ở tâm điểm mặt bích. Hệ truc tọa độ TOOL được người sử dụng đẩy vào trong điểm hoạt động của dụng cụ (Hình 3).

Một ưu điểm của việc dịch chuyển TCP (điểm hoạt động) từ tâm điểm của mặt bích đến TCP của dụng cụ là chuyển động thẳng trong hướng đẩy của dụng cụ (X TOOL) khi điểm hoạt động (TCP) đứng nghiêng trong không gian. Khi dụng cụ và có thể là chi tiết đã được đo chính xác, chuyển động có thể được bắt đầu lập trình. Ngôn ngữ lập trình là tiếng Anh (Hình 1).
Địa chỉ email của bạn sẽ không được công khai. Các trường bắt buộc được đánh dấu *