Danh mục sản phẩm
Th02 20, 2021 / Theo CỬA HÀNG VẬT TƯ / in Động cơ
Việc lựa chọn động cơ phù hợp cho các ứng dụng khác nhau dựa trên một số tiêu chí, chẳng hạn như yêu cầu độ chính xác vị trí, chi phí, công suất truyền tải, mô-men xoắn và yêu cầu tăng tốc. Nhìn chung, các động cơ như DC, servo và động cơ bước là những lựa chọn tốt nhất cho nhiều ứng dụng khác nhau. Nhưng, động cơ bước lại rất phù hợp cho nhu cầu có mô-men xoắn giữ cao và các ứng dụng tăng tốc ở mức thấp hơn. Nhiều người đang hiểu lầm rằng có một sự khác biệt rất lớn giữa động cơ DC, động cơ servo và động cơ bước. Bài viết sau cung cấp một sự khác biệt tổng thể giữa ba động cơ này.
Mục lục [Hiển thị]
Lựa chọn giữa động cơ DC, động cơ Servo và động cơ bước có thể là một bước khá quan trọng, bao gồm việc cân bằng nhiều yếu tố thiết kế, cụ thể là chi phí đầu tư, tốc độ, mô-men xoắn, gia tốc và cả mạch điều khiển đều đóng vai trò thiết yếu trong việc lựa chọn động cơ điện tốt nhất cho ứng dụng của bạn.
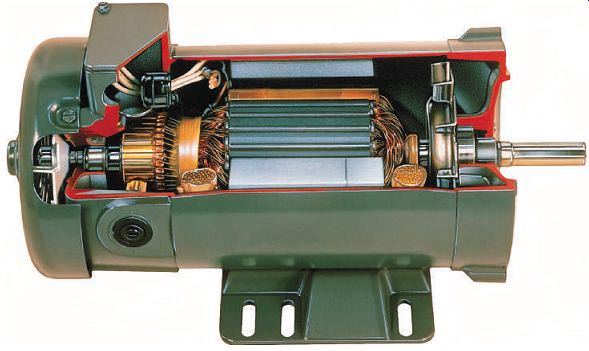
Động cơ DC là một động cơ quay liên tục có hai dây là dây cấp nguồn và dây âm. Khi cung cấp đủ nguồn điện, động cơ DC sẽ bắt đầu quay cho đến khi nguồn điện đó bị ngắt. Hầu hết các động cơ DC chạy ở tốc độ vòng quay mỗi phút khá cao (RPM), ví dụ như quạt được sử dụng trong máy tính để làm mát hoặc bánh xe ô tô điều khiển bằng sóng radio.
Tốc độ động cơ DC có thể được kiểm soát bằng cách sử dụng kỹ thuật PWM (điều chế độ rộng xung), một kỹ thuật tạo xung nhanh nhằm bật hoặc tắt nguồn ở một tần số nào đó. Tỷ lệ phần trăm thời gian tiêu thụ theo chu kỳ tỷ lệ BẬT / TẮT sẽ xác định tốc độ của động cơ. Ví dụ: nếu công suất được điều khiển ở mức 50%, thì động cơ DC sẽ quay với tốc độ bằng một nửa tốc độ 100%. Mỗi xung nhanh đến mức động cơ dường như không ngừng quay mà không có dấu hiệu thiếu hụt nguồn điện.
Thông thường, động cơ servo là sự kết hợp của bốn thành phần, cụ thể là động cơ DC, mạch điều khiển, bộ hộp số bánh răng và một chiết áp thường có vai trò là cảm biến vị trí.
Vị trí trục quay của động cơ servo có thể được điều khiển chính xác hơn so với động cơ DC thông thường và nói chung, chúng có ba dây gồm dây cấp nguồn, GND và dây điều khiển. Cấp nguồn cho các động cơ này được cấp liên tục, mạch điều khiển động cơ servo thay đổi dòng điện để điều khiển. Loại động cơ này được thiết kế cho các nhiệm vụ yêu cầu độ chính xác, trong đó vị trí góc quay động cơ cần phải rõ ràng chính xác như di chuyển cánh tay robot hoặc điều khiển bánh lái trên thuyền hoặc chân robot trong một phạm vi cụ thể.

Loại động cơ này không dễ dàng thay thế như một động cơ DC tiêu chuẩn. Góc quay thường chỉ từ 0 đến 180 độ hoặc thấp hơn. Động cơ servo có được tín hiệu điều khiển vị trí từ mạch bên trong và cấp nguồn cho đến khi trục quay đến vị trí chính xác, được xác định bởi cảm biến vị trí.
PWM (điều chế độ rộng xung) được sử dụng để điều khiển tín hiệu của động cơ servo. Nhưng, không giống như các động cơ DC, nó điều khiển chu kỳ của xung dương nhằm điều khiển vị trí, và phần nào là tốc độ của trục servo. Giá trị của xung trung tính phụ thuộc vào việc servo giữ cho trục của mô tơ servo ở vị trí chính giữa. Việc tăng giá trị của xung sẽ làm cho mô tơ servo quay theo chiều kim đồng hồ và một xung ngắn hơn sẽ đảo trục quay ngược chiều kim đồng hồ.
Xung điều khiển servo thường có chu kỳ 20 ms, về cơ bản nó sẽ cho biết động cơ servo sẽ quay như thế nào, ngay cả khi đó là vị trí cần đến. Khi một servo được lệnh khởi động quay, nó sẽ di chuyển đến vị trí và giữ tại vị trí đó, ngay cả khi có lực tác dụng bên ngoài đẩy vào nó. Động cơ servo sẽ chống lại việc di chuyển ra khỏi vị trí đó, với lực kháng tối đa mà động cơ servo có thể sử dụng là định mức mô-men xoắn của servo đó.
Tìm hiểu chi tiết về động cơ servo: https://cuahangvattu.com/su-dung-dong-co-servo-can-biet-nhung-dieu-nay
Động cơ bước cơ bản là một động cơ servo sử dụng nhiều phương pháp cơ giới hóa khác nhau. Cấu tạo bao gồm một động cơ DC xoay liên tục và mạch điều khiển kết hợp, động cơ bước sử dụng nhiều nam châm điện được bố trí xung quanh một trục trung tâm để định vị vị trí.

Động cơ bước cần một mạch điều khiển bên ngoài để cấp năng lượng riêng cho từng nam châm điện và làm cho trục động cơ BẬT. Khi nam châm điện được điều khiển bằng năng lượng, nó hút các răng của trục và giữ chúng, phần nào bù lại với vị trí nam châm cạnh đó. Khi cặp nam châm ‘A’ tắt, và cặp ‘B’ bật, trục sẽ xoay nhẹ để căn chỉnh hướng về cặp nam châm ‘B’. Được bố trí xung quanh vòng tròn trong vỏ động cơ là mỗi nam châm điện sẽ lần lượt kích hoạt hoặc triệt tiêu năng lượng để tạo ra một vòng quay. Mỗi bước quay từ một cặp nam châm điện tiếp theo được đặt tên là một ‘bước’, và do đó, động cơ có thể được kích hoạt bằng các góc bước được xác định chính xác để thực hiện một vòng quay 360 độ trọn vẹn.
Loại động cơ này được phân loại thành hai dạng, đó là đơn cực / lưỡng cực. Động cơ lưỡng cực là loại động cơ cứng nhất và thường có 4 hoặc 8 dây dẫn. Nó có hai mảng cuộn dây điện từ bên trong, và bước di chuyển được tạo ra bằng cách thay đổi hướng dòng điện trong cuộn dây. Động cơ đơn cực có thể nhận ra vì chúng có 5 dây, 6 dây hoặc cũng có thể là 8 dây, cũng đều có 2 cuộn dây bên trong, nhưng mỗi cuộn dây có một dây trung tâm. Những động cơ này có thể dịch bước mà không phải đảo hướng dòng điện trong cuộn dây, làm cho thiết bị điều khiển đơn giản hơn. Nhưng bởi vì dây trung tâm này được sử dụng để tăng cường chỉ một nửa của mỗi cuộn dây tại thời điểm mà chúng thường có mô-men xoắn ít hơn so với loại lưỡng cực.
Động cơ bước có thể tạo ra một mô-men giữ không đổi mà không cần đến động cơ khởi động, miễn là động cơ được sử dụng trong giới hạn của nó thì sẽ không xảy ra lỗi.
Tìm hiểu chi tiết về động cơ bước: https://cuahangvattu.com/dong-co-buoc-step-motor
Động cơ bước vòng kín hay step motor closed-loop là loại động cơ bước được tích hợp bộ encoder vào để nhằm cải thiện những nhược điểm của động cơ bước (mất bước, tốc độ quay, momen xoắn). Những cũng đảm bảo giá thành không cao như động cơ servo.
Hiện nay loại động cơ này được sử dụng rất phổ biến trong công nghiệp, máy móc sản xuất, máy công cụ, máy cnc, máy khắc laser,… Đáp ứng được yêu cầu về tốc độ, momen xoắn nhưng giá thành lại không quá cao như servo motor

Ưu và nhược điểm của động cơ DC, Servo, and động cơ bước bao gồm:
Vậy, trên đây là tất cả những sự khác biệt chính giữa động cơ DC, Động cơ Servo và Động cơ bước với những ưu điểm và nhược điểm. Chúng tôi hy vọng rằng bạn đã hiểu rõ hơn về các khái niệm này.
Địa chỉ email của bạn sẽ không được công khai. Các trường bắt buộc được đánh dấu *
Th03 26, 2021 by Sale 01
Th03 20, 2021 by CỬA HÀNG VẬT TƯ

