1.5m/s (Tối đa) | Lưu ý: Phụ thuộc vào tải và động cơ
Momen
3N.m (Tối đa)
Truyền động
Bộ truyền đai răng - Puly răng
Dẫn hướng
Con lăn - Thanh trượt tròn (Điều chỉnh với ốc lệch tâm)
Dây đai răng
PU-HTD3M-15 (Lõi thép)
Động cơ tương thích
Động cơ AC servo, động cơ bước (Size động cơ 57, 60)
Phụ kiện tích hợp (Tuỳ chọn thêm)
Cảm biến hành trình, Encoder, Linh kiện ghép nối hệ trục XYZ
Cơ cấu trượt TLM45B sử dụng cho các yêu cầu cần tốc độ cao, chính xác, tải nhẹ (Thường dùng nhiều trong công nghiệp, dây chuyển sản xuất). Sản phẩm có mực độ hoàn thiện cao, bền, kết cấu cơ khí chắc chắn, có thể điều chỉnh mực độ căng dây đai sau một thời gian dài sử dụng, dễ thay thế các linh kiện và sửa chữa. Thiết kế cho phép ghép nối nhiều bộ đơn, để tạo thành các hệ trục XYZ phức tạp
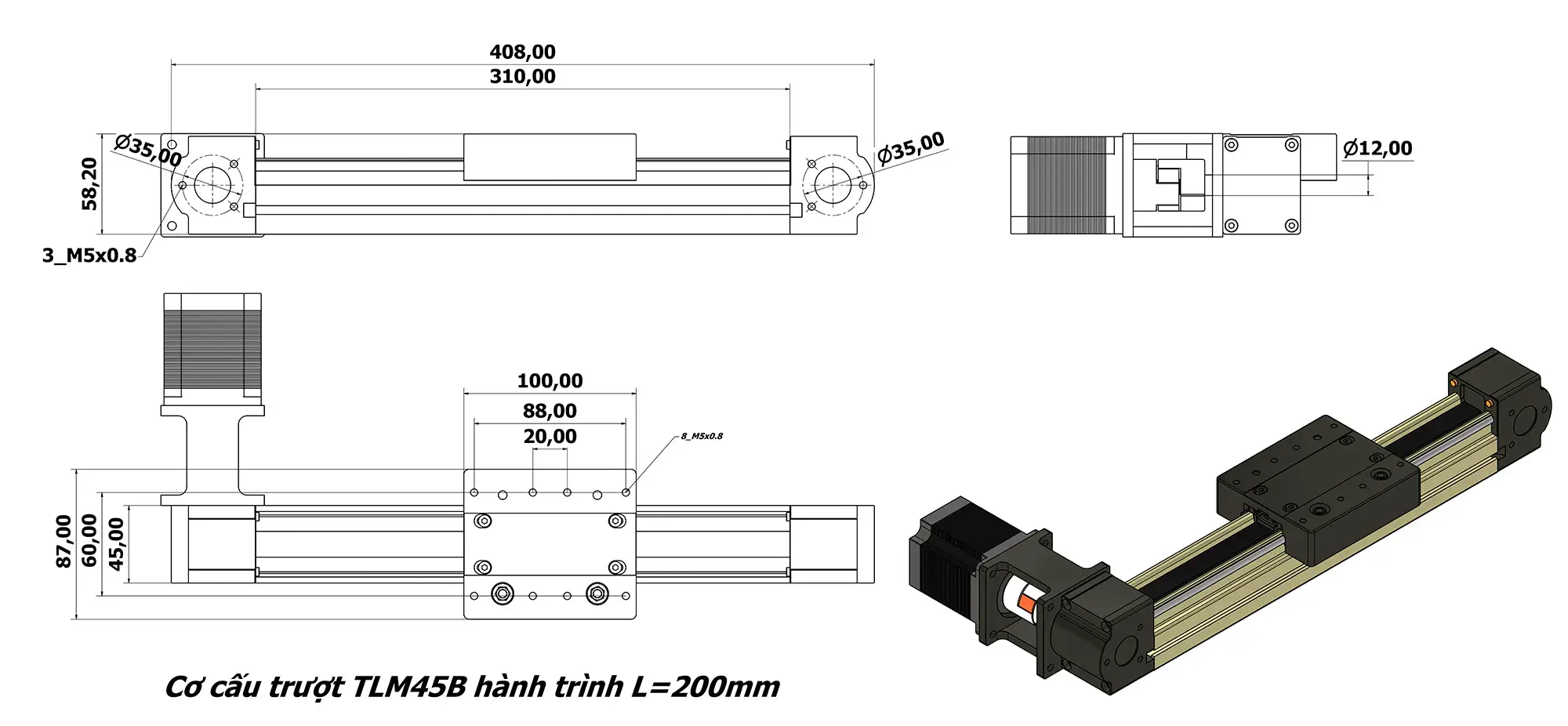
CHIỀU DÀI PHỦ BÌ = HÀNH TRÌNH DI CHUYỂN + 208mm
Cơ cấu trượt bộ truyền đai răng
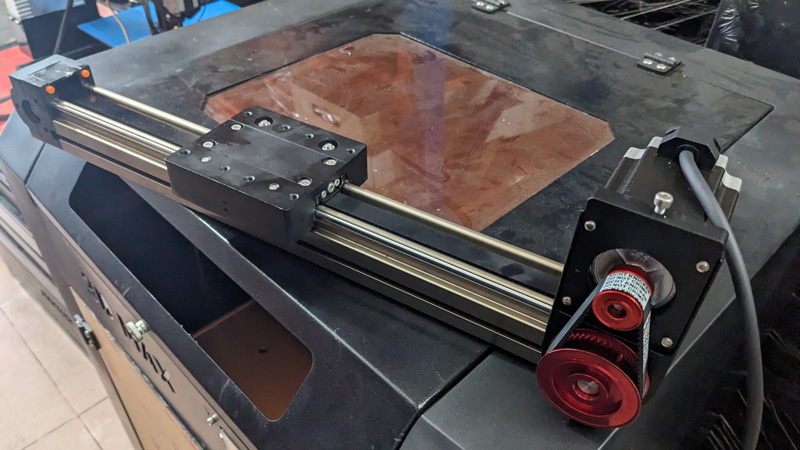
Module cơ cấu trượt TLM45B sử dụng bộ truyền dây đai răng và puly, giúp nó chuyện với tốc độ cao hơn rất nhiều so với các cơ cấu sử dụng vít me bi dẫn hướng. Cơ cấu trượt tuyến tính TLM45B thường dùng đi kèm với các sản phẩm: Động cơ bước, Động cơ bước hybrid, động cơ servo, các loại cảm biến
Cụm cơ cấu này có thể sử dụng kèm với những thiết bị khác: cảm biến, công tắc hành trình,… để phù hợp với nhiều mục đích trong các hệ thống sản xuất. Với đặc điểm tốc độ cao giúp nó có thể sử dụng trong các hệ thống chụp time-lapse, đo lường, di chuyển đồ vật, kéo dây – đường ống, máy khắc laser, máy hàn tự động, robot cấp phôi tự động
Thiết kế 3D Robot Gantry sử dụng cơ cấu trượt TLM45BGia công cơ cấu trượt TLM45B theo yêu cầu Cơ cấu trượt TLM45B (Qua bộ truyền đai tỉ số truyền 1:2.5)
Cấu tạo tổng thể
Dây đai răng 3M
Ròng rọc (Pulley răng) 3M
Cụm khung nhôm định hinh làm giá đỡ
Khớp nối trục động cơ
Cụm con trượt
Khung nhôm định hình
Con trượt
Gối đỡ trục 2 đầu (puly răng)
Bộ chi tiết lắp ráp cơ cấu TLM45B
Cảm biếncơ cấu TLM45B
Đặc điểm sản phẩm
Khung cơ cấu trượt TLM45B được làm từ hợp kim nhôm, truyền động bằng dây đai răng. Rất nhẹ, nên được sử dụng nhiều trong công nghiệp, lắp trên các máy tự động hoặc dây chuyền sản xuất, robot gantry, robot delta.
Tốc độ cao, chính xác, tiếng ồn thấp, hành trình dài lên đến 2m
Có thể phối hợp để tạo thành hệ trục Z, Y, X
Phù hợp với nhiều loại động cơ (Step motor, AC servo, Hybrid Servo)
Tiện lợi, ứng dụng đa năng, mức độ tuỳ biến cao
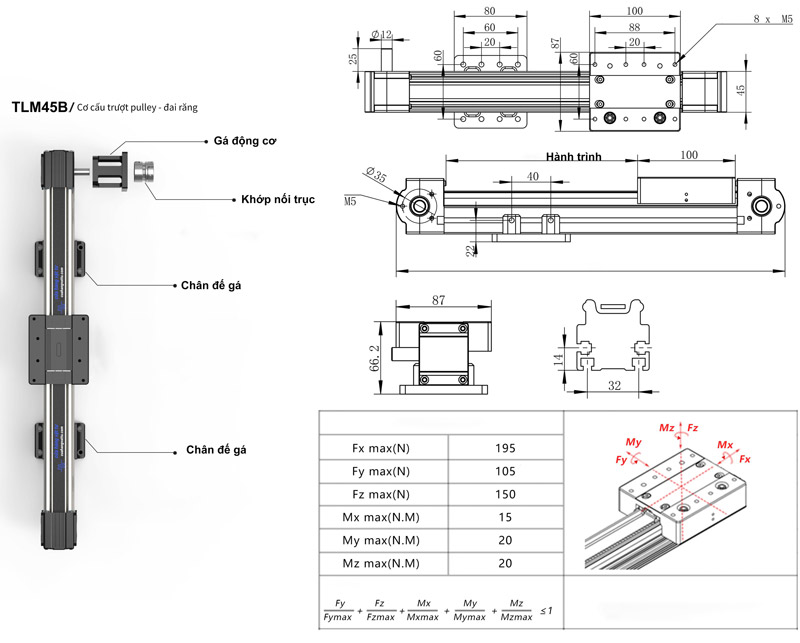
Bộ truyền đai răng - Pulley
Con trượt
Bản vẽ kỹ thuật
Gia công cơ cấu trượt TLM45B theo yêu cầuCơ cấu trượt TLM45B hành trình 12 mét
Để lại bình luận
Địa chỉ email của bạn sẽ không được công khai. Các trường bắt buộc được đánh dấu *
Thêm đánh giá của bạn
Địa chỉ email của bạn sẽ không được công bố. Các trường bắt buộc được đánh dấu *